AR Interaction Study
1,2
About three weeks ago, we were given the topic “Kiska Robot”, and it’s been such an exciting project to work on. Since our last meeting, we’ve been exploring what kind of robot Kiska should create, and today I’d like to share some of those thoughts with you.
3,4
I’ll briefly walk you through the process: first, we defined what Kiska is. Then we conducted desk research to narrow down which industries to focus on. After that, we developed design concepts and directions. Finally, we looked at the design potential. You can think of it like how AI generates images—starting from something blurry and abstract, and then layer by layer, turning it into something concrete and clear.
5,6,7
On day one, we reorganized the given brief into a mind map. Then we built sentences based on Kiska’s brand identity that we could use as creative resources moving forward.
8
From that, we concluded that Kiska’s robot should deliver a positive impact, respond to a clear scenario where a robot is truly needed, and provide physical services through active human interaction.
9
More specifically, we revisited the industries we had researched earlier and reprocessed that data to see which ones best aligned with Kiska’s identity. From there, we listed potential robot functions, chose a direction, and defined how the physical interaction might work.
10
This desk research wasn’t just to gather data—it was a critical step in making sure our chosen theme had a strong foundation and intent.
11
And to be clear, for something to be truly a robot—not just a product or service—it must meet four essential conditions: autonomy, functionality, interaction, and embodiment.
12
We then explored what kinds of forms could satisfy those conditions.
13
Out of the countless industries where robots are applied, we narrowed it down to four: retail & service, home care, agriculture, and search & rescue. These felt most aligned with Kiska’s warm, positive, and proactive movement.
14,15,16,17
We also carried out competitor research within each of these industries. Since all of that is already organized on our Miro board, I’ll skip over those details today.
18
In summary, our key takeaway was this: a robot must either exceed human physical capability or take on tasks that humans don’t want to do—things that are repetitive, physically demanding, or emotionally sensitive. Most importantly, it has to perform functions that software alone cannot replace.
19
With that in mind, we moved into ideation within the chosen industries.
20
For today’s meeting, rather than locking into a final design, we wanted to highlight the possibilities—showing you how the ideas could evolve before moving into detailed concepts and visualization.
21
So, we identified three overarching concept directions. The first is social-issue-driven, the second is about discovering a new market, and the third goes beyond the human domain.
22
Let me walk you through the first idea.
23,24
Our research confirmed that populations are aging rapidly, especially in developed countries. This means the working population is shrinking, while the burden of supporting older generations continues to grow.
25
To address this, we propose a caring robot that can support elderly people at home. This robot would offer a wide range of movements to actively assist with daily life, whether indoors or outdoors. At its core, it would be a mobility-based platform.
26,27
To build this scenario, we listed movements within the home that typically put strain on an elderly person’s body. Out of that, we identified eight major actions.
28
We then sketched solutions and generated AI-based images as design references. For example, imagine a robotic arm module that moves freely along the Z-axis, taking over repetitive tasks like standing up and sitting down—things that strain the spine and joints. It’s a scenario that’s both intuitive and impactful.
29
From there, new design directions emerged: a frame-shaped robot with arm modules that seniors can hold onto and move with, a furniture-like design they can sit on, or a mobility robot that helps with walking.
30
The second concept focuses on agriculture.
31
This industry is already heavily mechanized—machines handle tasks like irrigation, seeding, and harvesting. But when it comes to delicate actions, like removing rotten crops or pulling out misplanted ones, machines fall short. These tasks still rely on human labor, and we see this as a perfect niche opportunity for robots.
32,33
The idea here is a robot that can physically lower itself to the ground and perform those precise, human-like actions. To design this, we first listed out all the tasks that humans currently must do, and then translated each one into potential robotic movements and mechanisms.
34,35,36,37
As with the first concept, we sketched these ideas and then developed AI-generated design references. The output goes beyond just robotic hand modules—it shows the intention behind various possible movements.
38,39
The third concept is a rescue robot. We propose a four-legged design, specialized in movement, capable of handling dangerous but necessary tasks that humans cannot safely do. We envision creating multiple user scenarios to demonstrate its full potential. And unlike many of the existing designs on the market, which often look intimidating or unpleasant, we aim to soften its form so it carries emotional value as well.
40
So, to summarize:
-
Concept 1: A mobility-based robot for elderly care.
-
Concept 2: An agriculture robot centered on robotic arms that replace precise, labor-intensive human tasks.
-
Concept 3: A four-legged rescue robot that can actively operate in hazardous environments.
41–44
That concludes today’s presentation. In the additional notes, we’ve included some extra resources we highly recommend reviewing later. Thank you very much.
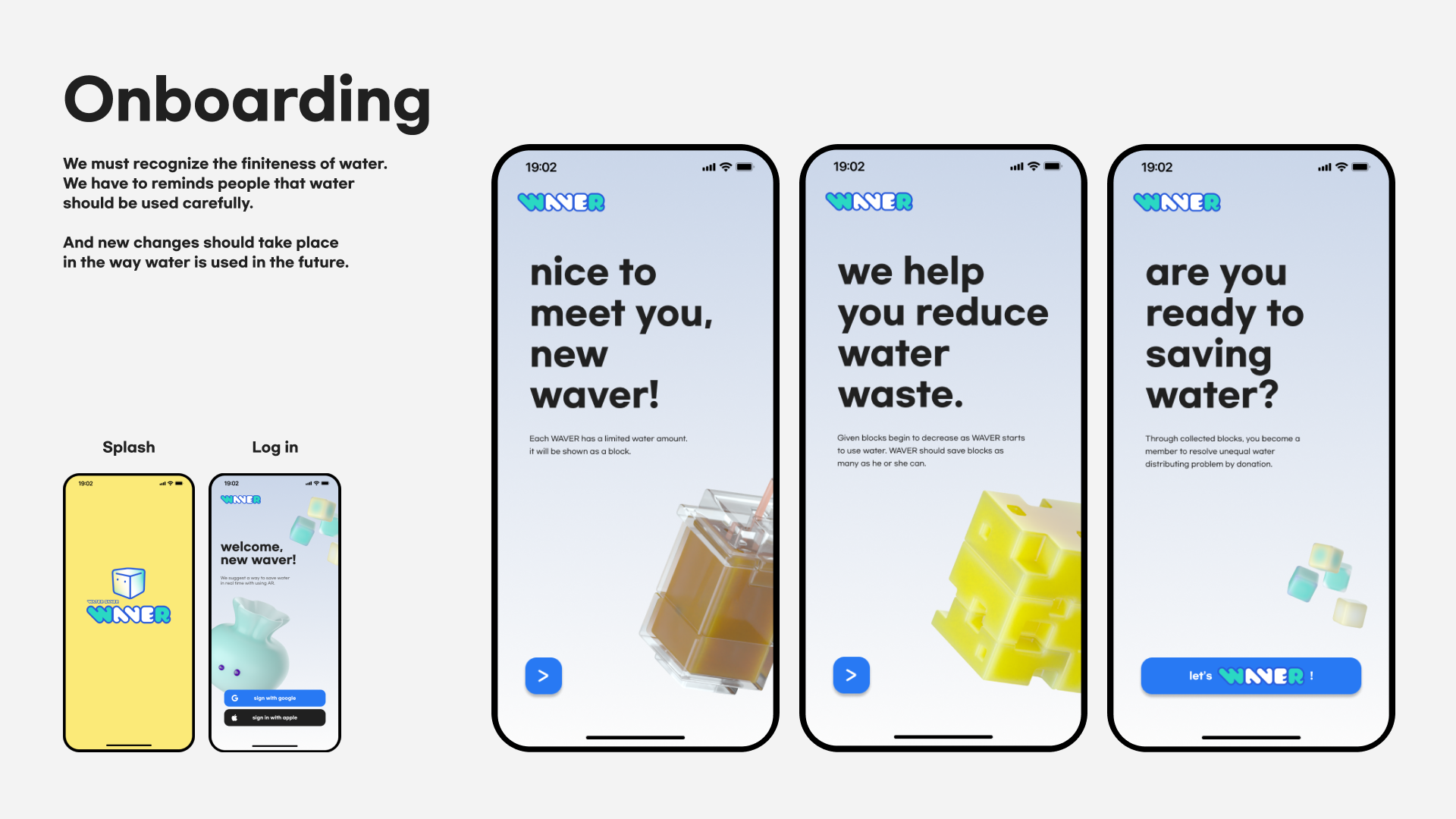
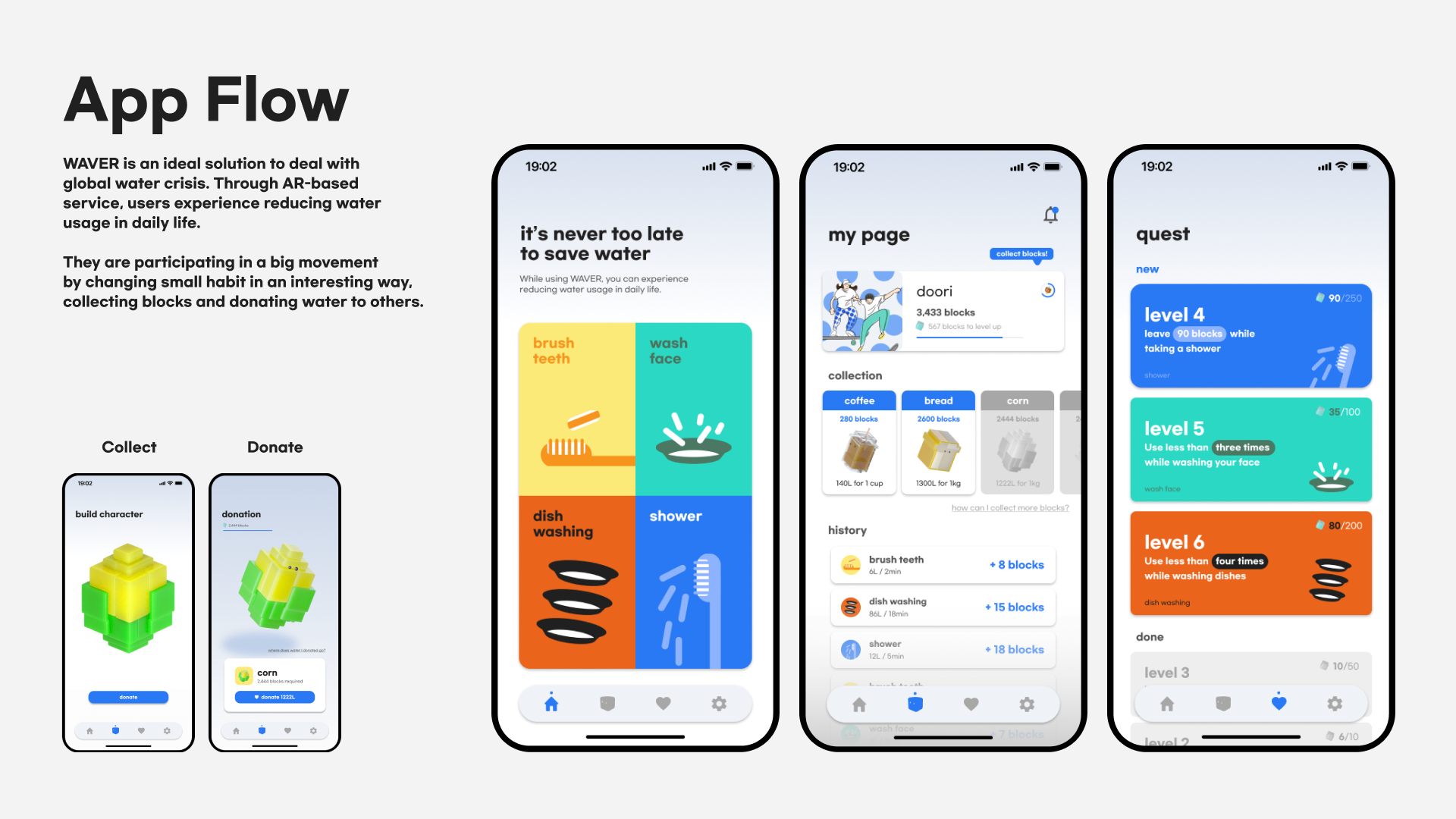
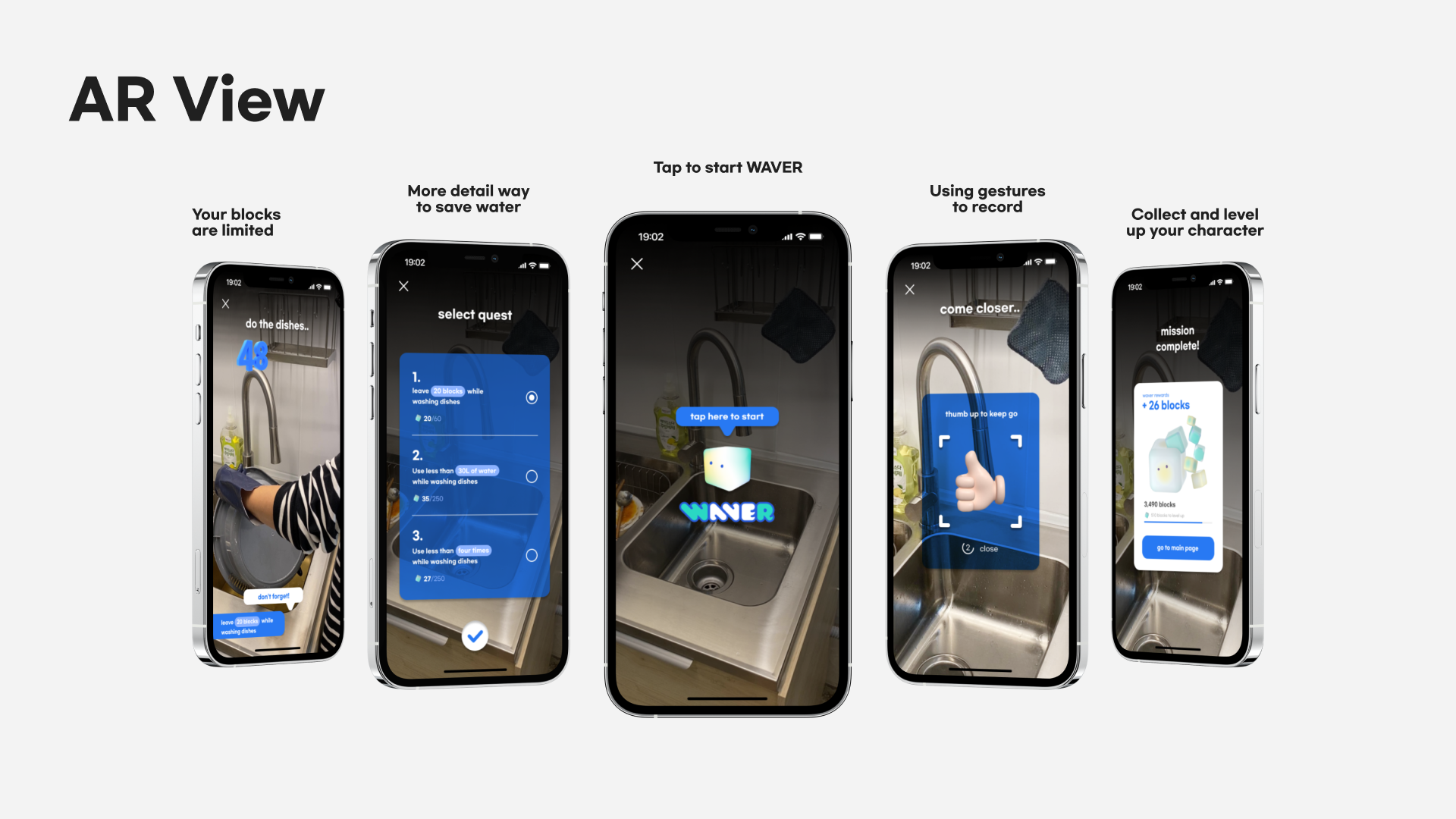
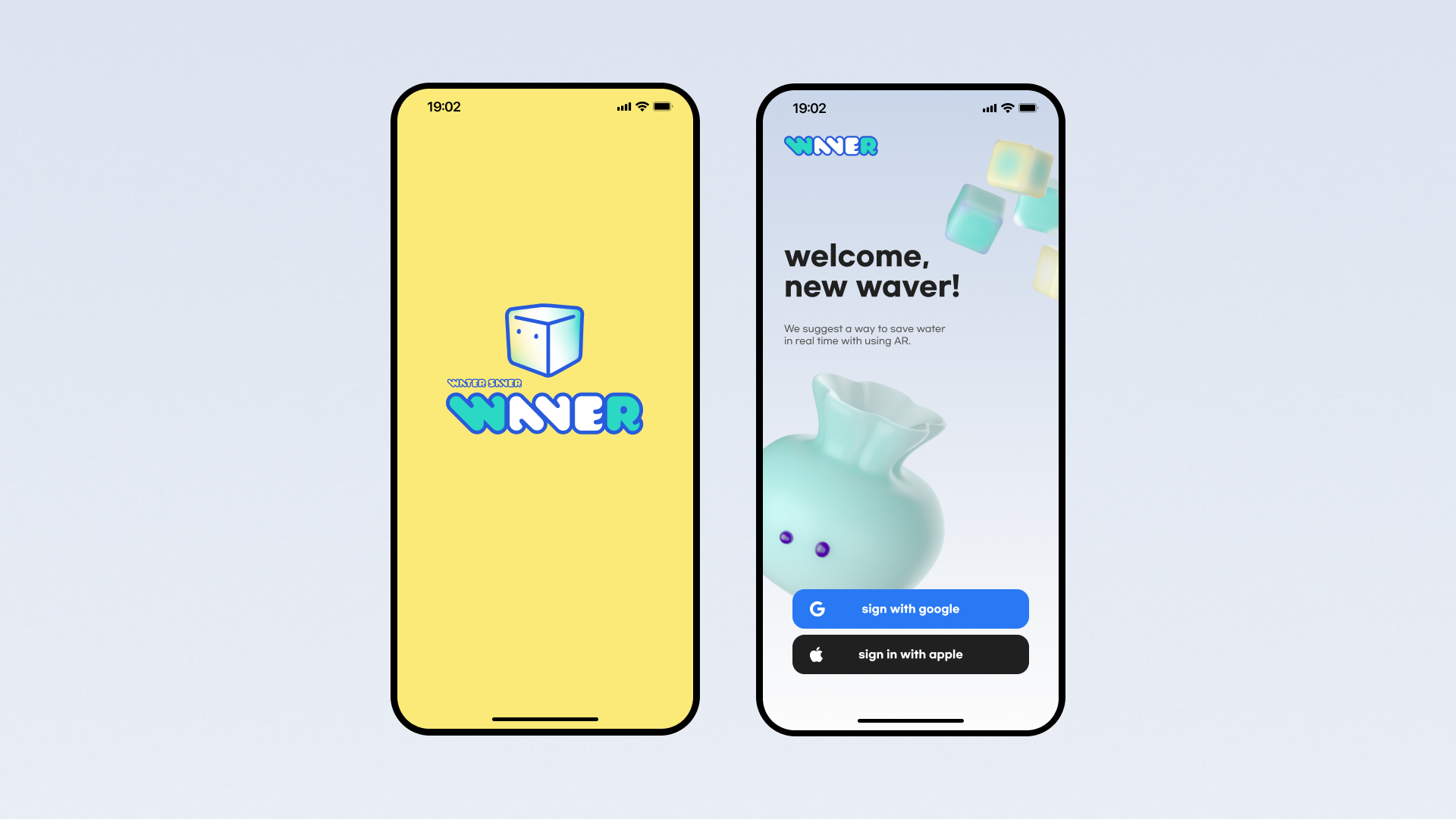
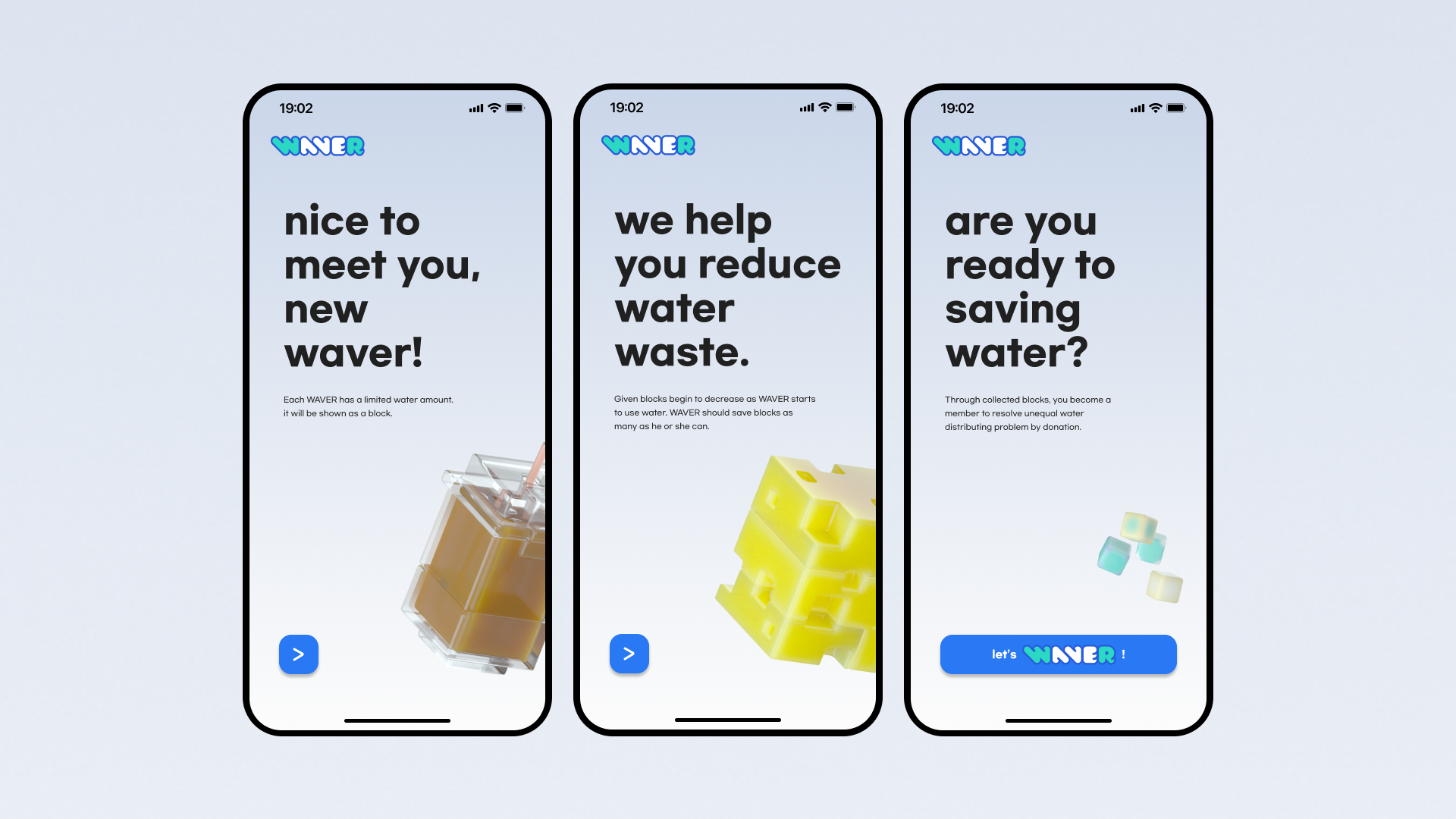
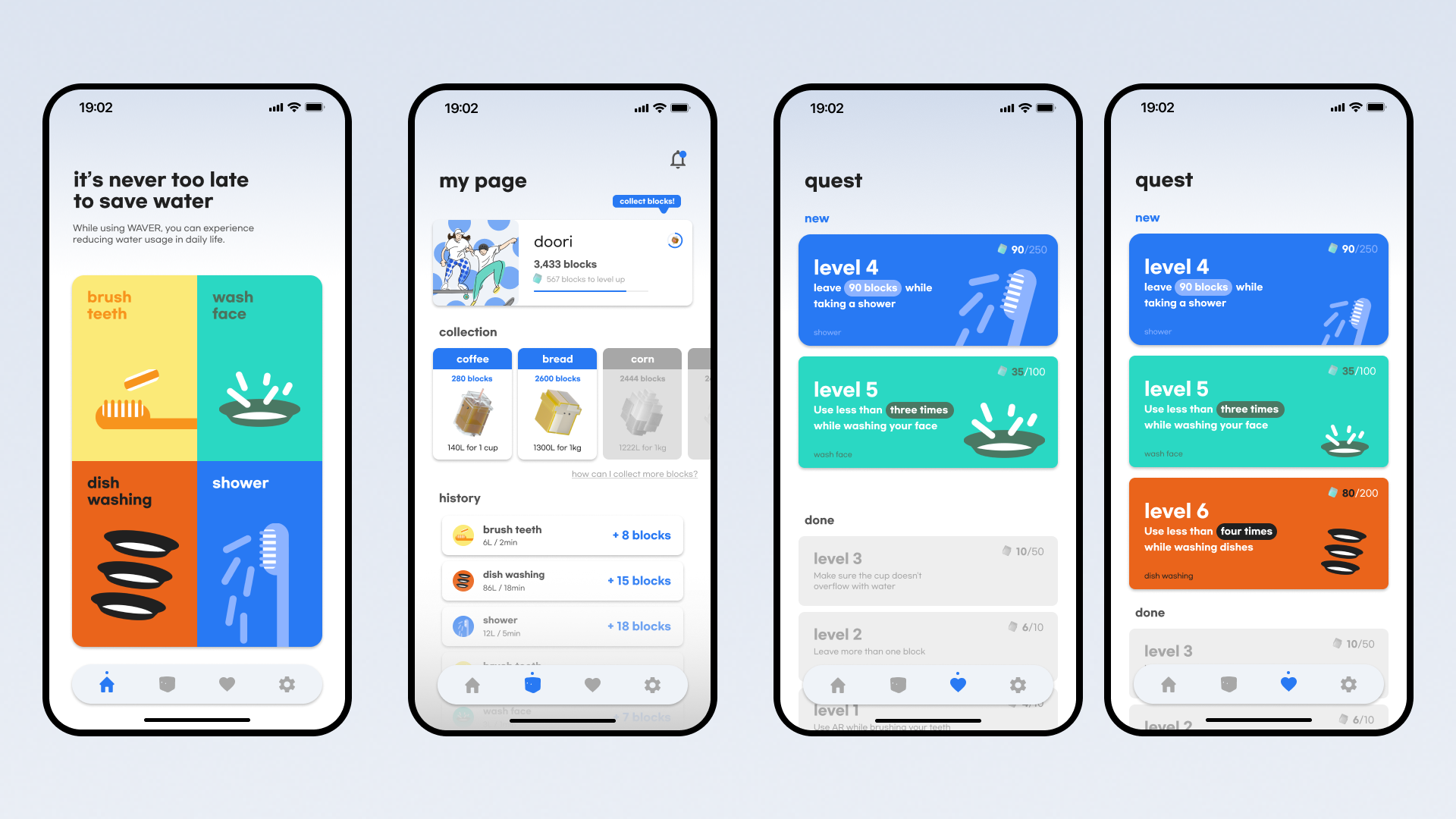
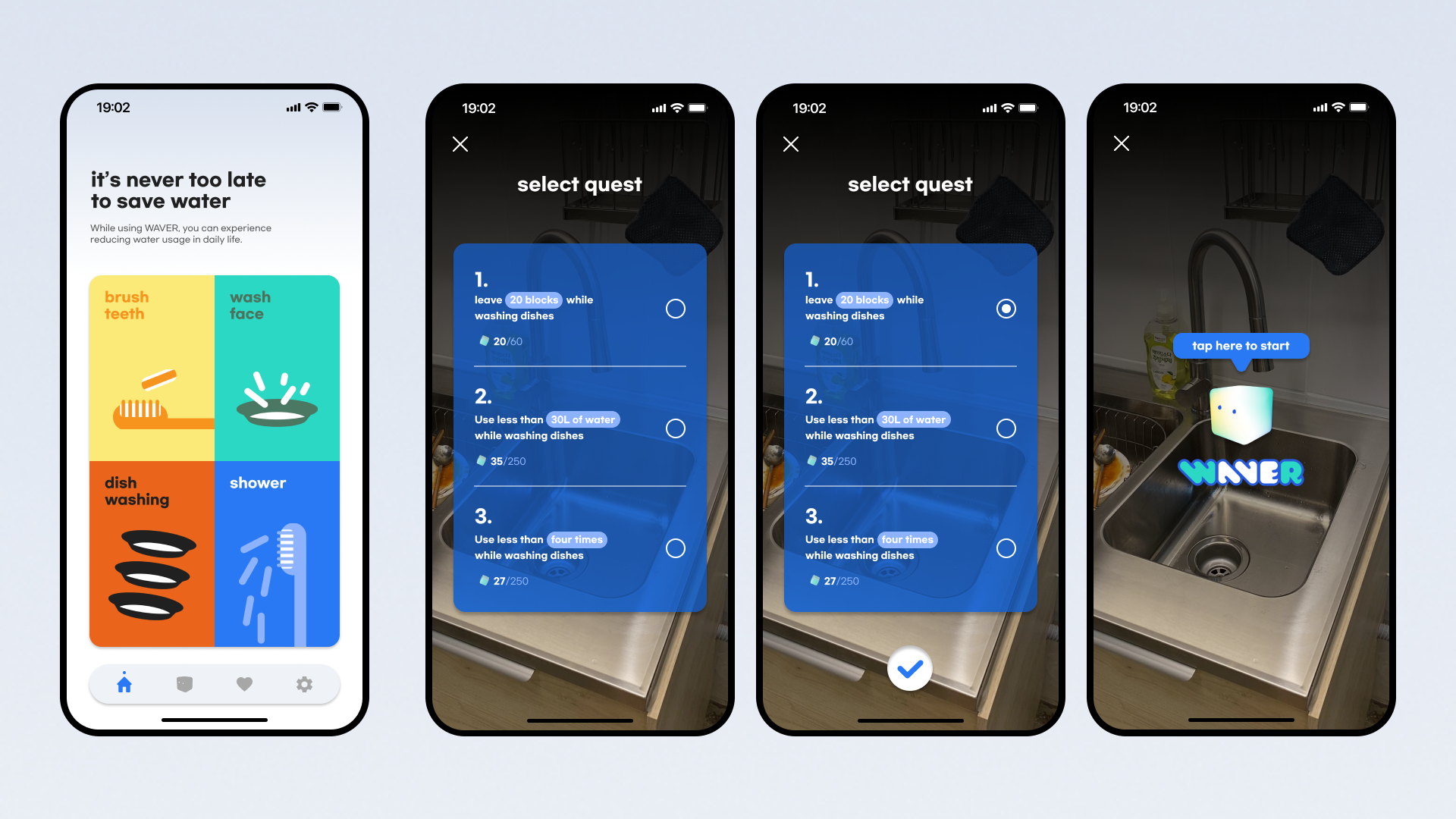
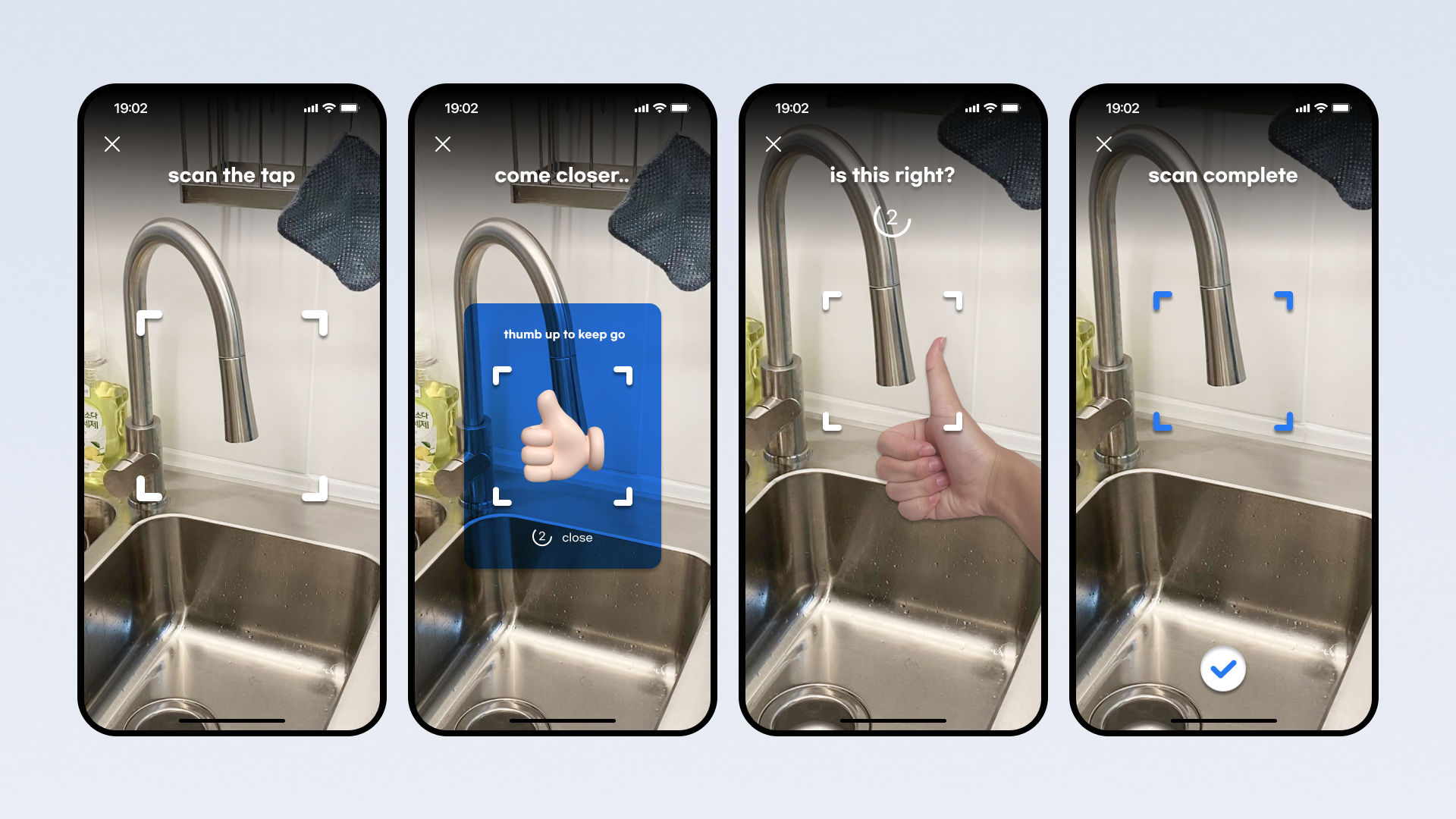
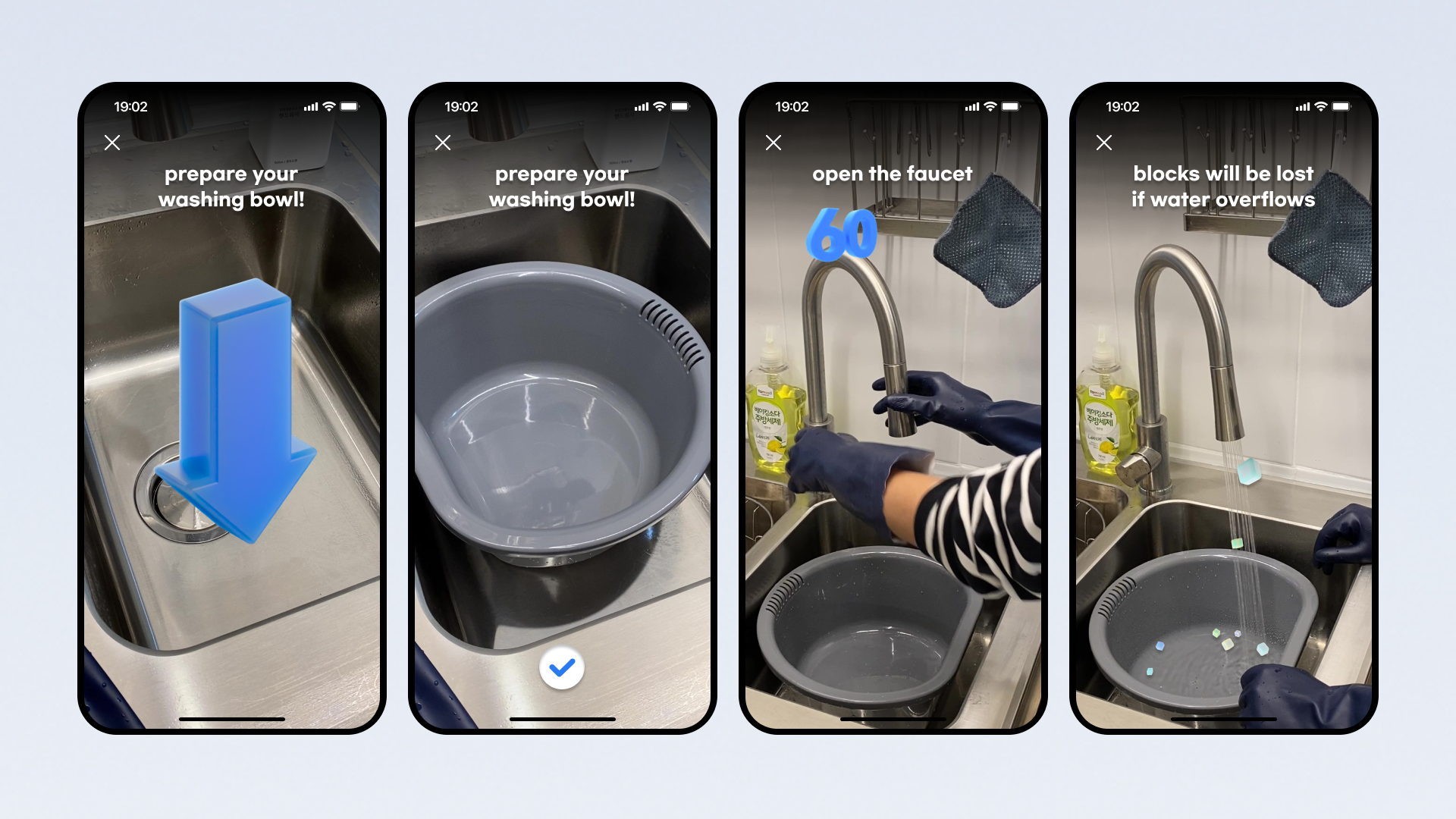
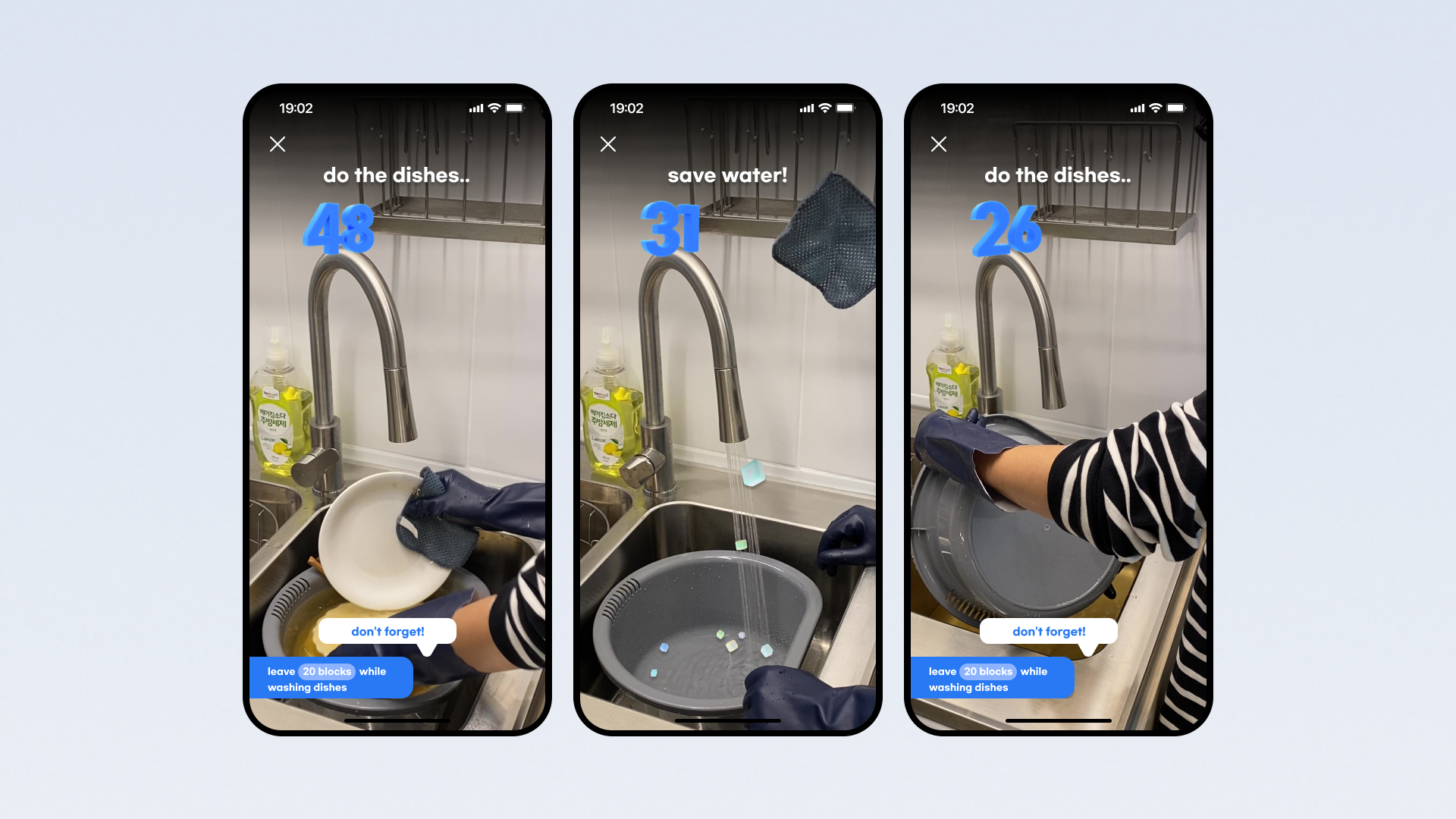
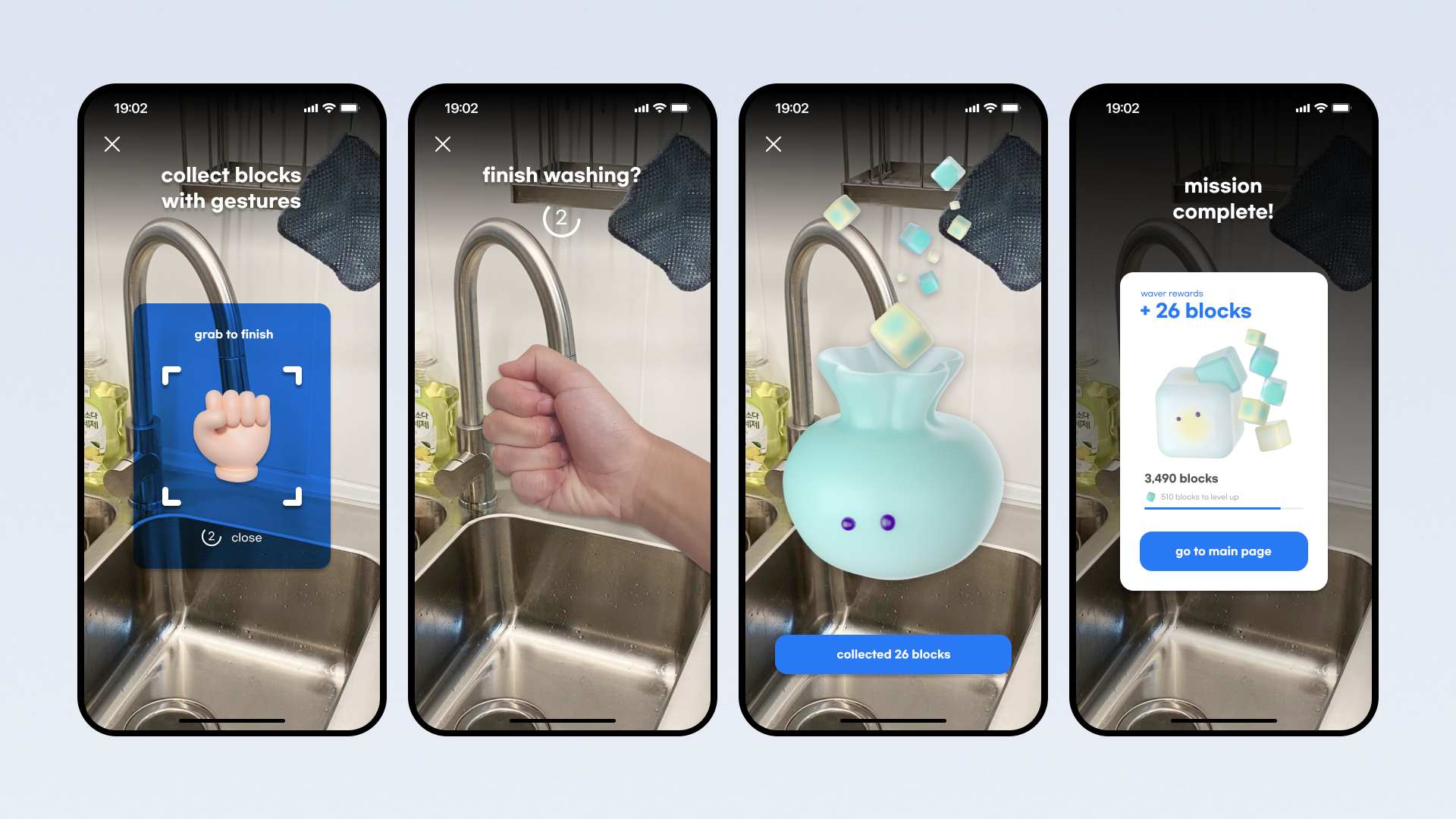
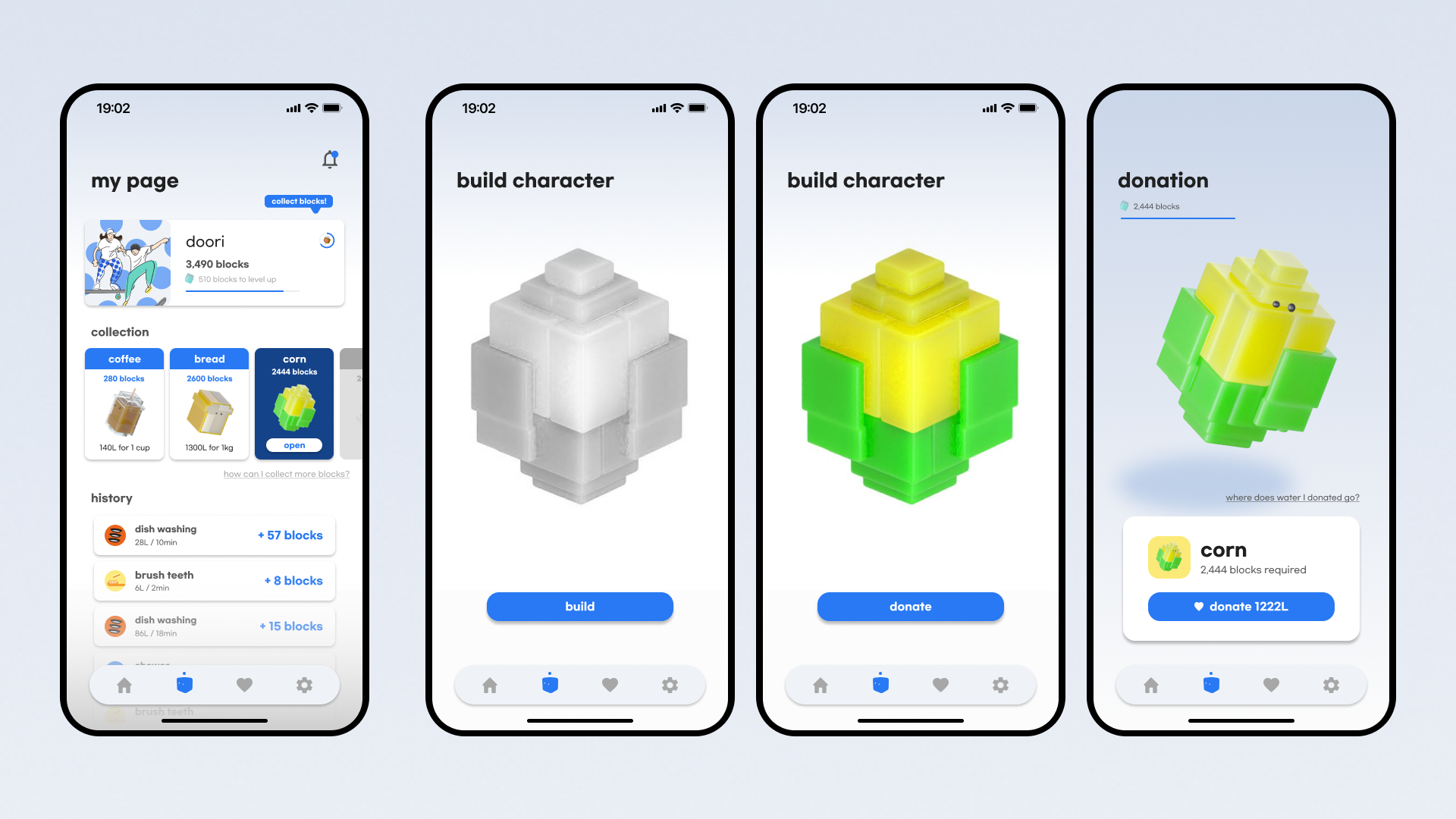
App UI
24–09–2024